
IKT-BT: Indirect Knowledge Transfer Behavior Tree Framework for Multirobot Systems
We are thrilled to announce the publication of our groundbreaking research on multirobot communication in IEEE Transactions on Cybernetics!
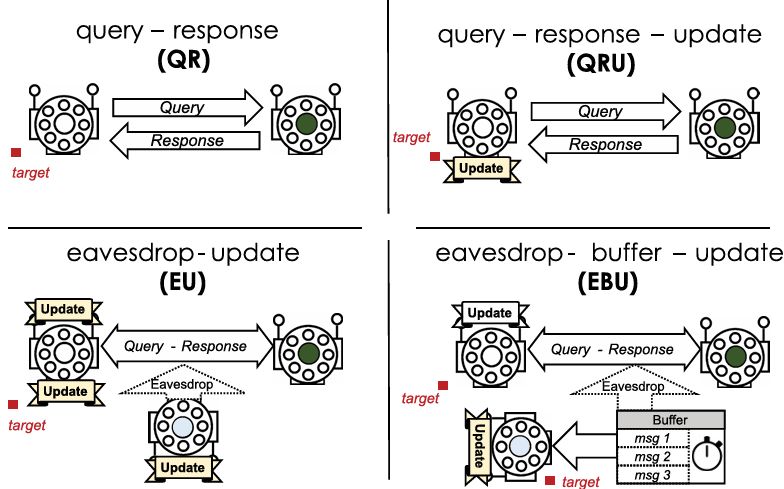
IKT-BT introduces a nature-inspired approach to robot coordination: instead of each robot asking the same questions repeatedly, they can “eavesdrop” on conversations between others and learn passively, just like picking up skills by overhearing a conversation.
Abstract:
Multiagent and multirobot systems (MRS) often rely on direct communication for information sharing. This work explores an alternative approach inspired by eavesdropping mechanisms in nature that involves casual observation of agent interactions to enhance decentralized knowledge dissemination. We achieve this through a novel indirect knowledge transfer through behavior trees (IKT-BT) framework tailored for a behavior-based MRS, encapsulating knowledge and control actions in behavior trees (BT). We present two new BT-based modalities—eavesdrop-update (EU) and eavesdrop-buffer-update (EBU)—incorporating unique eavesdropping strategies and efficient episodic memory management suited for resource-limited swarm robots. We theoretically analyze the IKT-BT framework for an MRS and validate the performance of the proposed modalities through extensive experiments simulating a search and rescue mission. Our results reveal improvements in both global mission performance outcomes and agent-level knowledge dissemination with a reduced need for direct communication.
Key Contributions:
- Two Eavesdropping Strategies: Eavesdrop-Update (EU) for immediate learning, and Eavesdrop-Buffer-Update (EBU) for memory-efficient knowledge management.
- Communication Strategies: Reduce overhead while improving knowledge dissemination.
- Validation: Extensive search-and-retrieve simulations demonstrate significant performance gains.
This work tackles a critical gap in multirobot systems: how to share procedural knowledge efficiently without overwhelming communication channels. Think of it like apprenticeship learning, but for robots.
Applications:
- Disaster response
- Industrial automation
- Any scenario where fast, efficient knowledge sharing is crucial
Read more:
Citation Box:
Full Citation:
S. Oruganti, R. Parasuraman, and R. Pidaparti, "IKT-BT: Indirect Knowledge Transfer Behavior Tree Framework for Multirobot Systems Through Communication Eavesdropping," IEEE Transactions on Cybernetics, 2025. doi: 10.1109/TCYB.2025.3560564.
BibTeX:
@ARTICLE{10976677,
author={Venkata, Sanjay Sarma Oruganti and Parasuraman, Ramviyas and Pidaparti, Ramana},
journal={IEEE Transactions on Cybernetics},
title={IKT-BT: Indirect Knowledge Transfer Behavior Tree Framework for Multirobot Systems Through Communication Eavesdropping},
year={2025},
volume={},
number={},
pages={1-0},
keywords={Robots;Eavesdropping;Knowledge transfer;Memory management;Scalability;Robot kinematics;Planning;Ontologies;Translation;Training;Behavior trees (BT);collective intelligence;eavesdropping;knowledge transfer;multirobot systems (MRS)},
doi={10.1109/TCYB.2025.3560564}}