This work explores an alternative approach inspired by eavesdropping mechanisms in nature that involves casual observation of agent interactions to enhance decentralized knowledge dissemination. We achieve this through a novel IKT-BT framework tailored for a behavior-based MRS, encapsulating knowledge and control actions in Behavior Trees (BT).
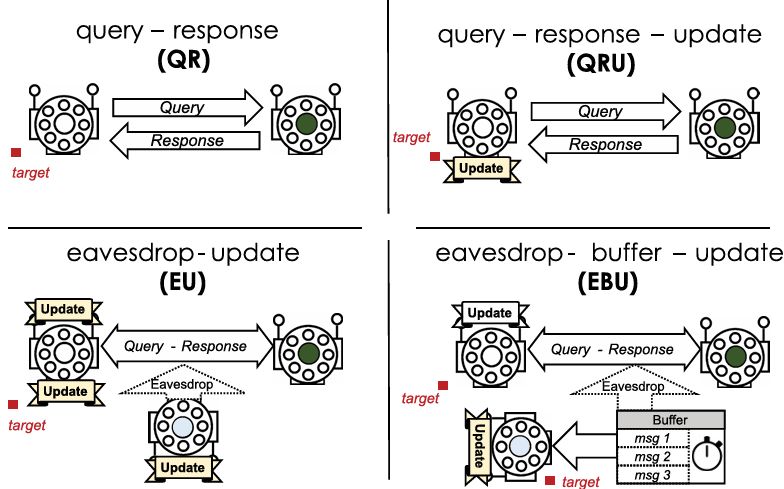
We present two new BT-based modalities - eavesdrop-update (EU) and eavesdrop-buffer-update (EBU) - incorporating unique eavesdropping strategies and efficient episodic memory management suited for resource-limited swarm robots. We theoretically analyze the IKT-BT framework for an MRS and validate the performance of the proposed modalities through extensive simulations in a multi-robot search and rescue scenario.
The framework demonstrates improved knowledge dissemination and collective performance compared to traditional direct communication approaches, while maintaining scalability and robustness in heterogeneous multi-robot systems.