Research
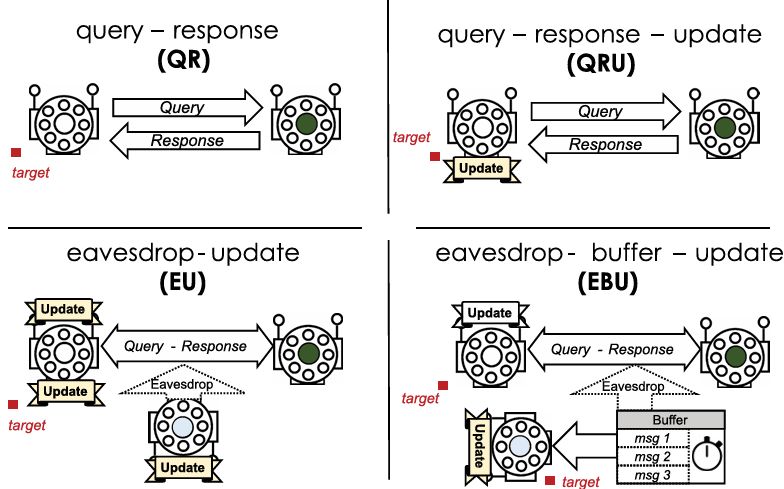
A novel framework inspired by eavesdropping mechanisms in nature that involves casual observation of agent interactions to enhance decentralized knowledge dissemination. The framework demonstrates improved knowledge dissemination and collective performance compared to traditional direct communication approaches.
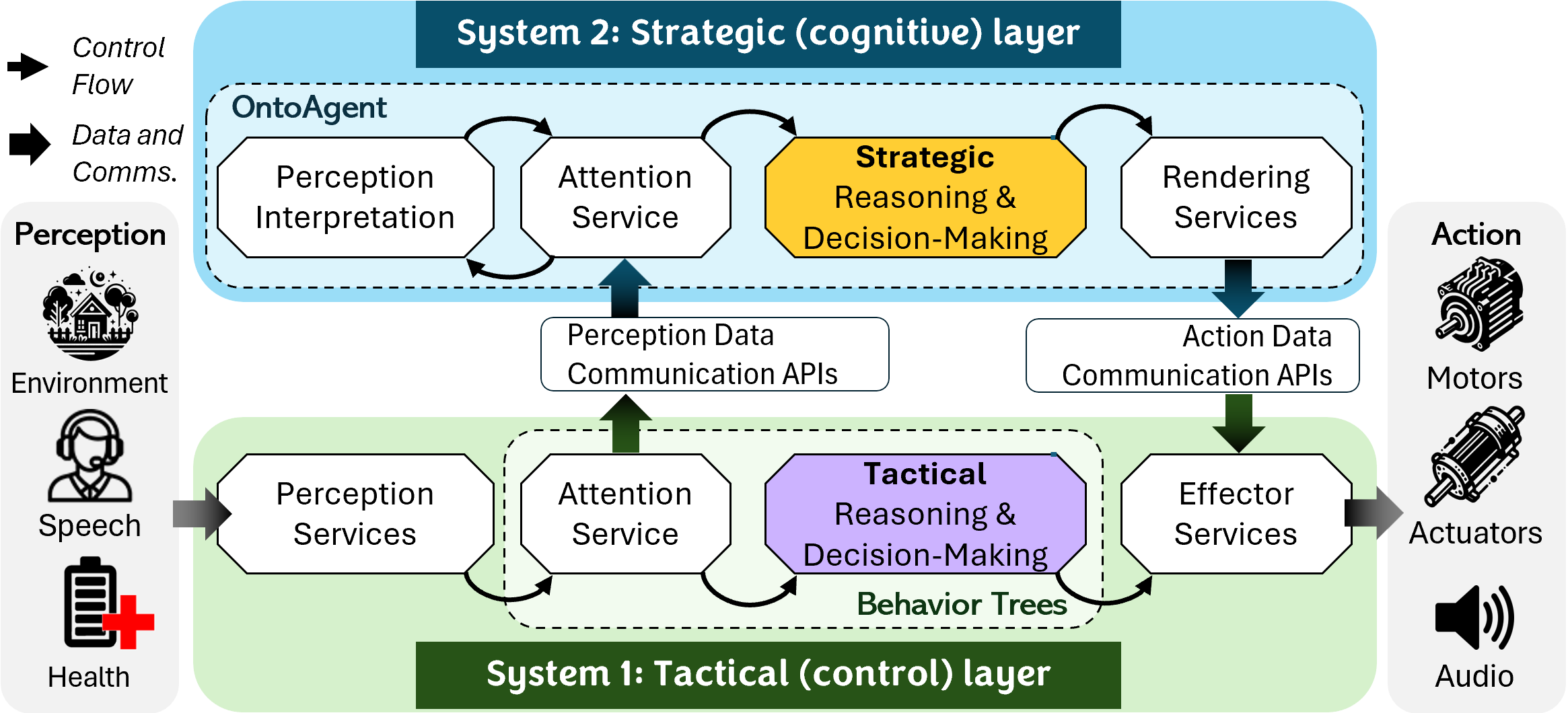
Our work on the HARMONIC framework has been accepted for presentation at ICRA 2025, focusing on cognitive and control collaboration in human-robotic teams.

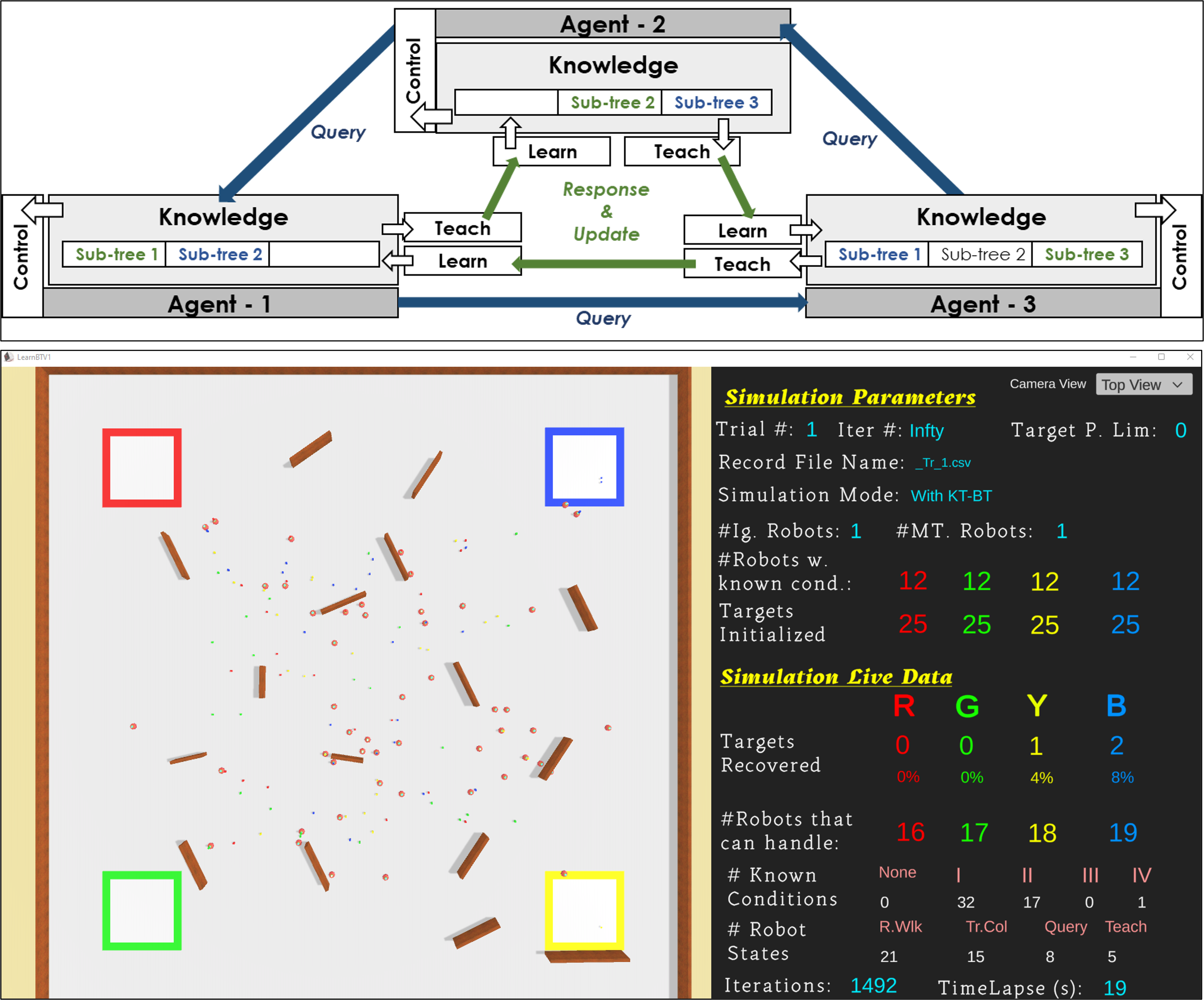
A novel framework for Knowledge Transfer through Behavior Trees in Multirobot Systems, introducing an efficient approach for knowledge sharing in multi-agent systems.